|
The idea
I want to have a wargaming set that uses formed units of infantry, cavalry and guns working together. I've already got a Napoleonic skirmish collection so I've decided that the Crimea is going to fit the bill. The plan
I've wanted to do a Crimea project for nearly thirty years now but the size of the armies under the rules I used to use to play games like this made it a daunting task. However, more recently I started looking at books by Neil Thomas which cover the period and they require much more modest forces. The final bit of the puzzle was Sharp Practice by Too Fat Lardies which countless people recommended. Churning all this around in my tiny brain, I ended up with the following plan. I'm going to assemble the two armies using the Sharp Practice template (with modifications, obviously) for each side and stick to the recommended eight figure units. This is a better option for me than the Neil Thomas organisation which has an equivaqlent number of units but each requires sixteen figures for infantry and twelve for cavalry. I won't be using individually based miniatures which seems to be usual for Sharp Practice or sub groups of four miniatures as suggested by Neil Thomas but instead I'm going to mount each unit on a single base. which means no casualty removal but results in a better look to my eyes. The armies
Each side will have a basic force of teninfantry, four cavalry and a gun per side with three commanders. I'm going to be using Great War Miniatures from Northstar for this project which come in packs of six infantry or three cavalry so infantry units will be assembled in pairs requiring two troop packs and a command pack. Cavalry will be three to a unit and guns will be a single gun with the provided crew. This will give me: 64 infantry 12 cavalry 1 gun and 4 crew 1 General and staff and 2 junior commanders For each side with 'flavour' extras as follows: A unit of skirmishers (Rifles) and two extra units of French infantry for the British and an extra unit of Cossack and two extra guns for the Russians. British
2 units of Guards- Coldstream 2 units of Highlanders- 93rd Sutherland 2 units of line infantry in shakos 2 units of line infantry in caps 1 unit of skirmishing Rifles 1 unit of Lancers- 17th 1 unit of Hussars- 11th 1 unit of Scots Greys 1 unit of Inniskillings 1 gun with 4 crew 3 commanders- Raglan and staff and Lord Lucan and Cardigan 2 units of French infantry 16 units total Russians
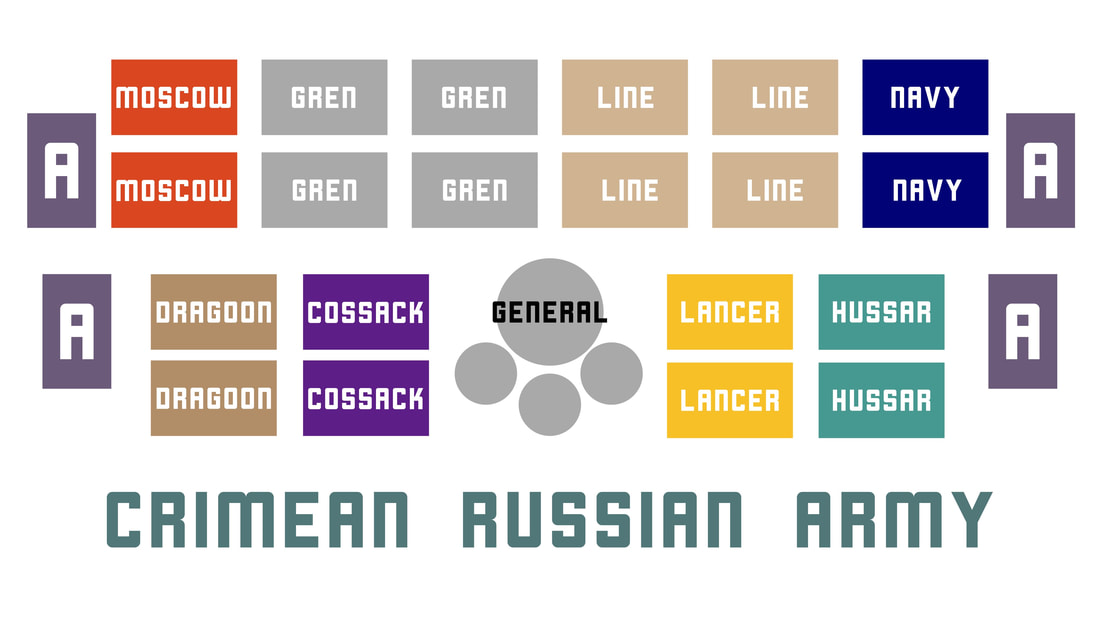
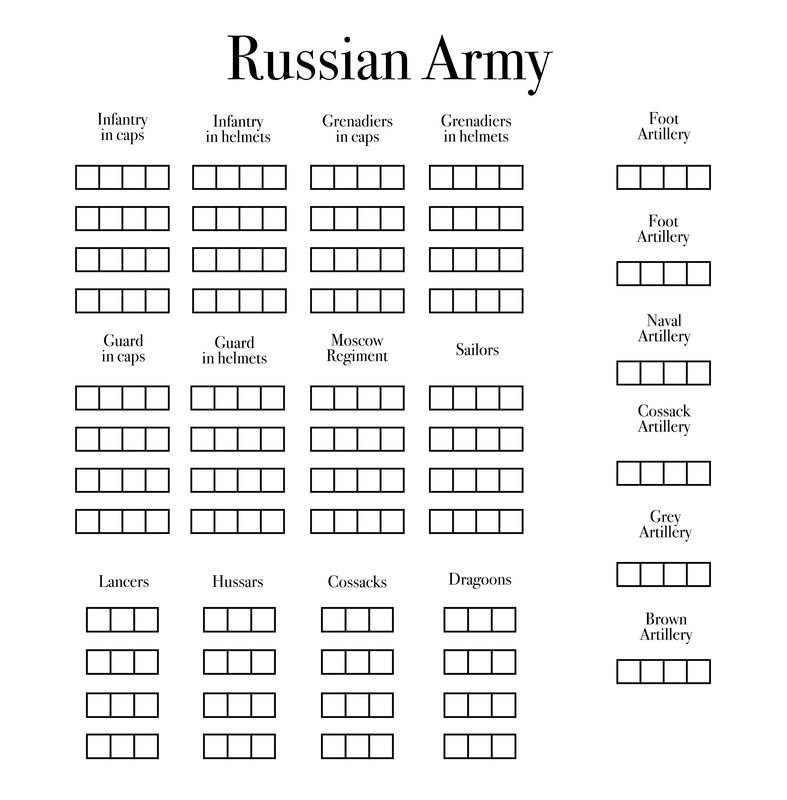
2 infantry units in hats 2 infantry units in helmets 2 Grenadier units in hats 2 Grenadier units in helmets 2 units of sdailors 1 unit of Moscow Regment 1 unit of dragoons in helmets 1 unit of dragoons in hats 1 unit of hussars 1 unit of lancers 1 unit of Cossacks 3 guns with 4 crew each 3 commanders 19 units total I really want some lancers for the Russians so I've ordered a set from Foundry, hopefully they'll be a decent match. I'll replace a Cossak unit with them. While I was there I also ordered a unit of Moscow Regiment to add numbers and variety to the Russians. 
The revised and extended plan
There are tables in Neil Thomas' Wargaming 19th Century Europe that players roll on to see what units they get for a scenario. The maximum number of infantry is six so I've decided to increase my infantry count to twelve bases so I can field six 16 figure infantry units. I've ordered a double unit of British line infantry (in coats for variety, I've had enough of red) and another pack of the Moscow unit making it a double based unit like the rest to achieve this. The British can have two skirmishers so I'm going to produce another set of 95thRifles. Russians require a maximum of four guns and the allies two so I've modified my plans to include these new totals. The maximum cavalry per side is three units. I'm capping mine at two for the moment, using single base units and brigading them. So, for instance, my 17th Lancers and 11th Hussars will be brigaded into the Light Brigade and fight as a single 6 figure unit of cavalry. The Russians get a unit of 'free' Cossacks for every scenario so I'm going to do two bases of Cossacks so they're a full 6 figure cavalry unit on their own. I may increase all my cavalry to double units later depending on how much I enjoy painting them and how they look on the table. That's a total ogfeighteen extra horsemen which isn't too many on paper. Stay tuned for a further update, I'm loathe to stop at half measures. The diagrams below show where the plan is at the moment. 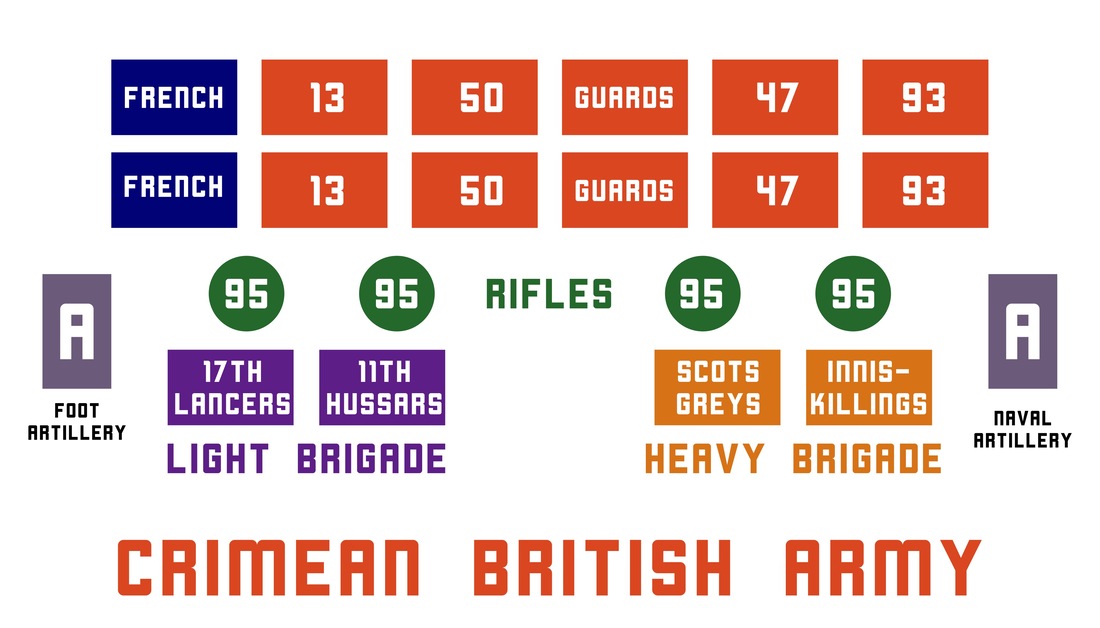

The big army plan
After only a day or so of thought I've decided to increase all the proposed cavalry units to two bases each. I'm also going to add a second skirmisher unit to the British/allies in the form of some Zouaves and two extra commanders per side. The new army plans look like this: 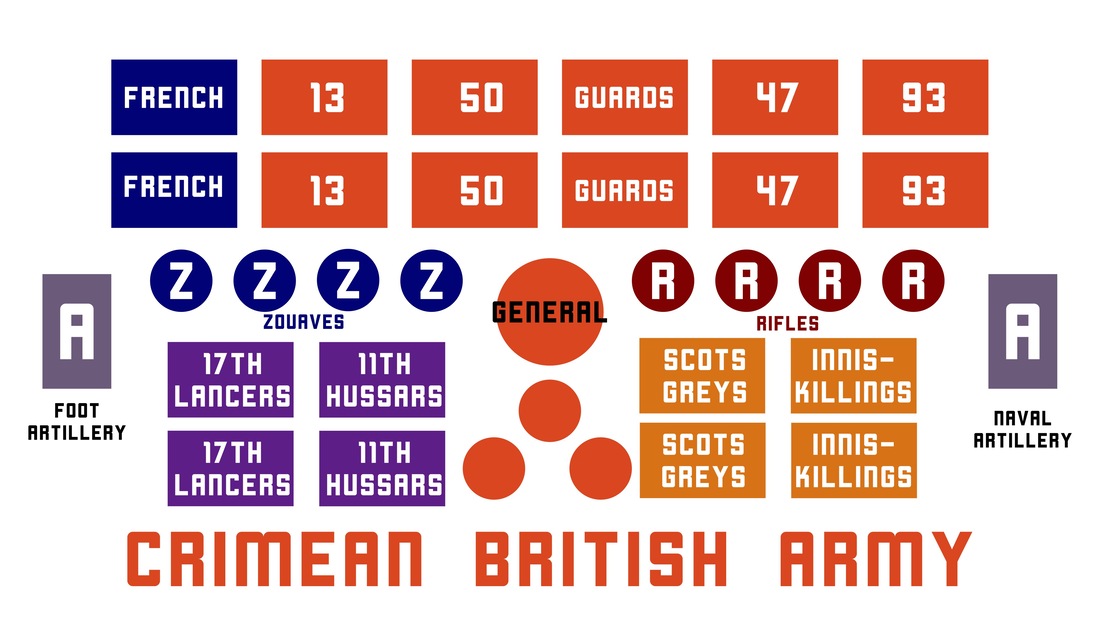
The rules
After a couple of games the Russians started to become much more dangerous to the British than we originally thought. Initially I planned to give the Russians twice as many men per unit than the British so that they could soak up casualties better and we played the first scenario from Neil Thomas' book with this in place. Despite this, with the russians having to advance down the length of the table, they were massacred by the British long-range musketry. In the second game, where the engagement took place across the width of the table, The Russians actually won. For this game I gave the Russians two extra infantry units and an extra gun but didn't give them the double hit points they'd had before. Based on my previous experience, I advanced the British too casually, and paid the price. We have settled on a few changes to the rules as written for our future games. The British remain unchanged except for commanders (see later) and the designating of both heavy cavalry units as cavalry rather than dragoons to reflect how they were used historically. The Russians receive an extra two infantry units and an extra two guns along with the 'free' Cossacks that the rules already give them each game. In addition, both the Russian dragoons and the Cossacks are 12 man units rather than 8 to increase their effectiveness slightly. Commanders The rules don't include anything on commanders but I want to use the miniatures so we have adapted the idea of commanders giving extra actions to units from the Charge of the Light Brigade rules written by David Louis Raybin. Both sides have a General, a cavalry commander and two infantry commanders. Each round, these commanders can spend their command points to give units under them that are in line of sight an extra action (maximum of one per unit). Generals have 3 points Cavalry commanders have 2 points Infantry commanders have 1 point. Army rosters
The final army rosters look like this. 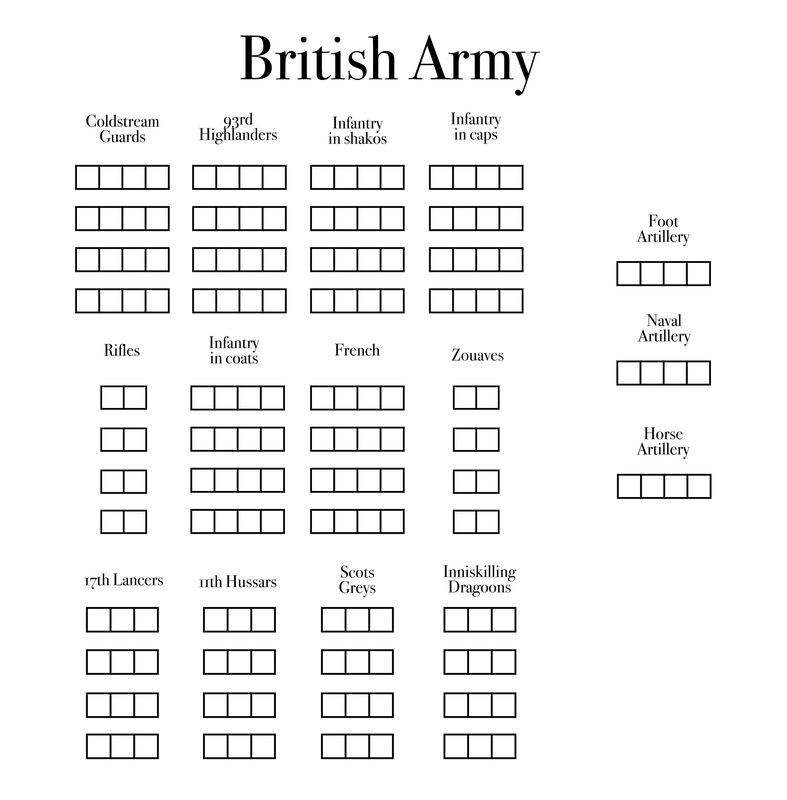












I started painting for this project on April 1st and had all the infantry complete by the end of May. Happy with the progress so far.
Not the world's biggest armies, but suitable for the 6'x4' space i have available. 

Cavalry
Russian lancers from Foundry. 




17th Lancers.




11th Hussars. I'm painting them along with the Zouaves because the colours are the same for the most part.



Russian Dragoons.


Scots Greys.





Cossacks.




Inniskilling Heavy Dragoons.



Russian Hussars.




Russian command.


I aded an extra infantry commander to the Russians to help them move their infantry forward a little quicker.

British command.


The extras. Two Russian Guard infantry and two more guns. The guns are from Warlord to add variety.









2023 Additions
The Russians are still not a real match for the British and French so I've decided to add some more units. Firstly I'm adding two infantry units. The flags this time are from Great War Miniatures via Northstar. 




Secondly, I'm adding another two Russian guns (from Warlord) and giving the Russians two redoubts so some of their artillery will always have cover.


The redoubts are from Debris of War.


Finally(?), I'm giving the Russians another unit of Cossacks.



2024 Additions
Time for some Turks. I've sourced an infantry unit, a gun and a unit of Bashi Bazouks from Foundry. 



From Great War miniatures I've bought another unit of Russian dragoons and a General Cathcart model to be a fifth British infantry commander.





|
The Russians
Infantry. 




Grenadiers.




Moscow Regiment.




Russian sailors.



The British
93rd Sutherland Highlanders. 

Coldstream Guards.



Rifles skirmishing.


British infantry. The 47th, the Lancashire regiment.


The 50th, the Queen's Own West Kent Regiment.


The 13th (1st Somersetshire) Regiment.



French infantry.


Zouaves
I decided I wanted some Zouaves so I've bought some ACW Zouaves from Perry miniatures to be the second allied skirmish unit. I have a French standard left so I've added the standard bearer into the mix, probably not a good idea for real skirmishers to be waving a flag around but it'll add more colour and panache to the unit. 



The Light Brigade




Artillery
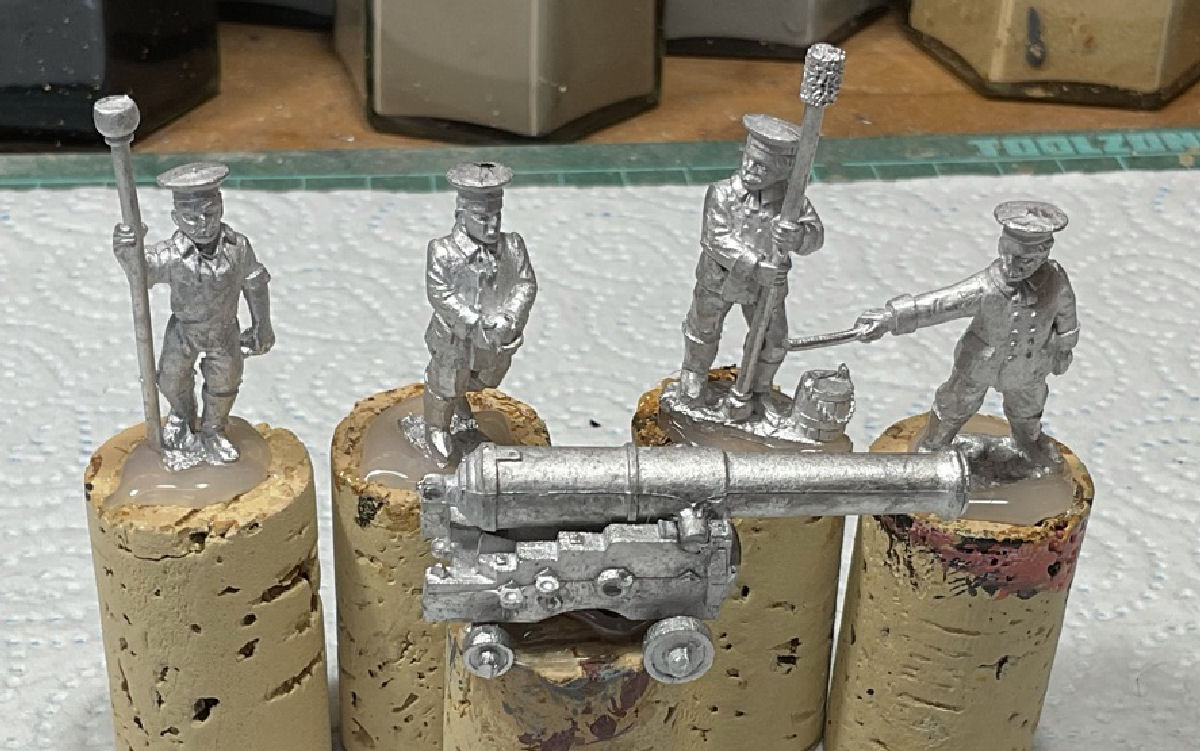
A 64pdr British naval gun and crew from Foundry. 



Russian howitzer and Cossack crew from Foundry.




British foot artillery.


Russian naval gun.


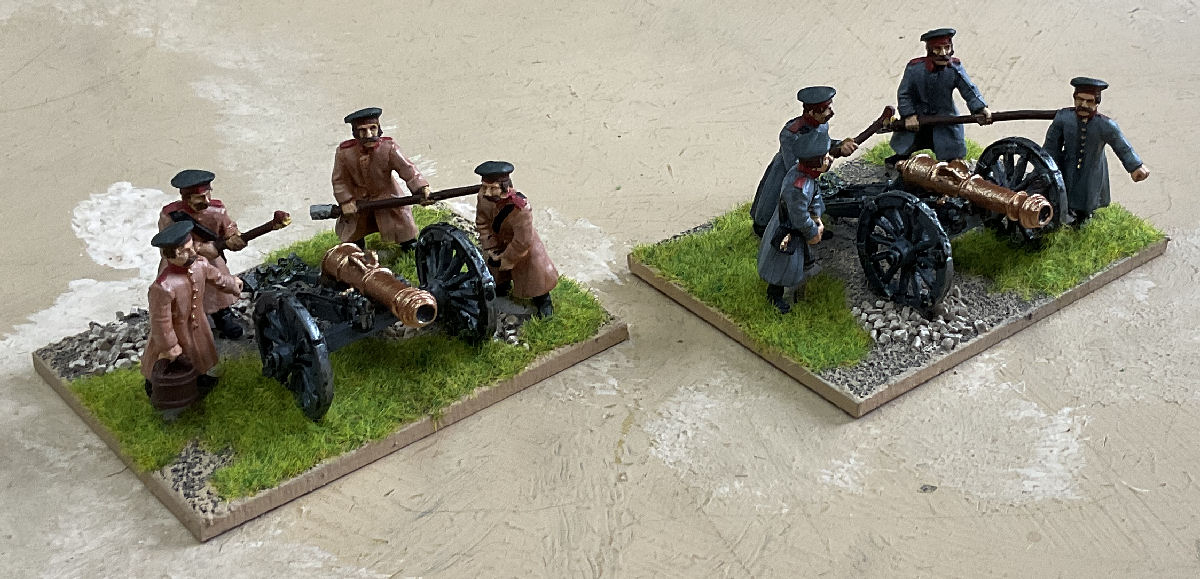
A pair of Russian foot artillery guns and crew.



30.08.2021
The final piece. Everything's complete now. The original project, the enlarged armies that I increased as I went along and revised my targets and even the extra Russian infantry and guns added in to give them a fighting chance. But, I decided that it wasn't right that my Crimea project should be without some Britannia miniatures, since it was they who had sparked my interest in the period way back in 1992. Consequently, I decided to add a Britannia gun and crew to the project. I chose the Royal Horse Artillery because a gun and crew is a self-contained unit and the style differences between the miniatures and the rest of the armies won't matter as much. 


On 11.08.2021 Mark and I tried out Neil Thomas' C19 rules. We had good fun but the Russians got destroyed really easily by my British so we need to have a think about how to improve the balance without removing the period flavour.
We picked the first sdcenario in the book. The Russians defended and set up first, deploying quite far forward. 
The British arrived from the opposite side of the table. Some British were kept off-table as a flanking force that would appear later in the game (all this is rolled randomly at the start).

The British advanced across the railway line.

The Russians move up to meet the British advance and deploy their guns in the centre.

The 11th Hussars charge the Russian Dragoons on the hill and are driven back with casualties.

As the British deploy into line their firepower proves decisive in destroying a Russian cavalry probe on their left. The British flanking force's arrival destroys the Russian right wing.

Undeterred, the Russians continue their advance into the British fire. Alas, their resolve and toughness are not enough and, with decimated units and the British holding all three objectives, the Russians surrender the field.

Pictures from our second game. This time, with a numerical superiority and only having to traverse the width of the table the Russians fared much better and won the engagement.




Our 4th game which we filmed.





The meeting house.

The church.
Houses.

damaged houses.







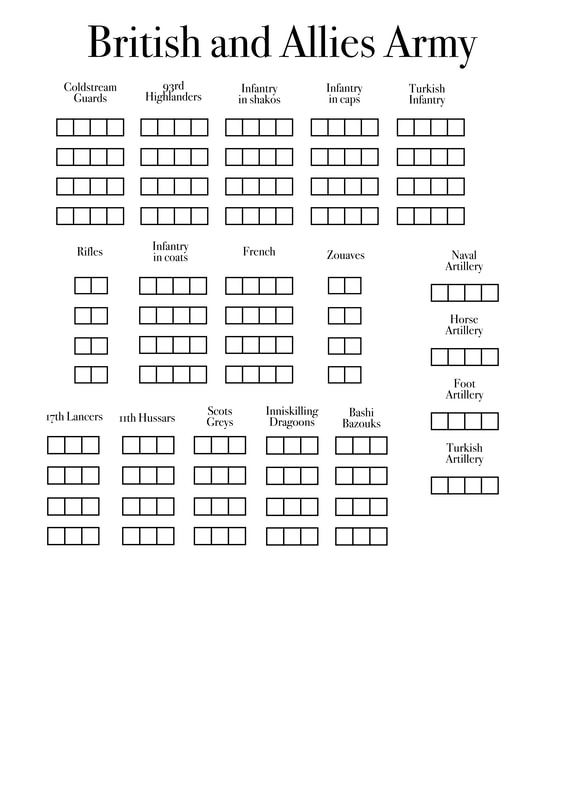
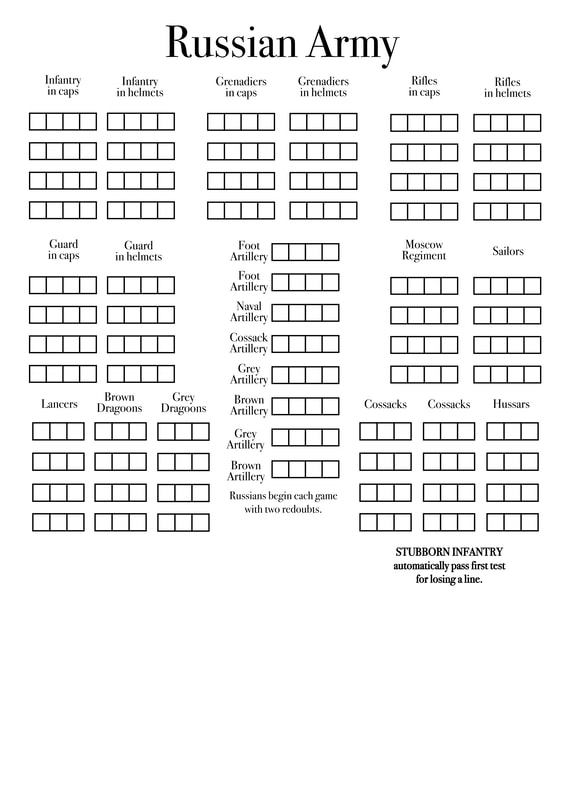
Updated army rosters.


My completed Russian Army.





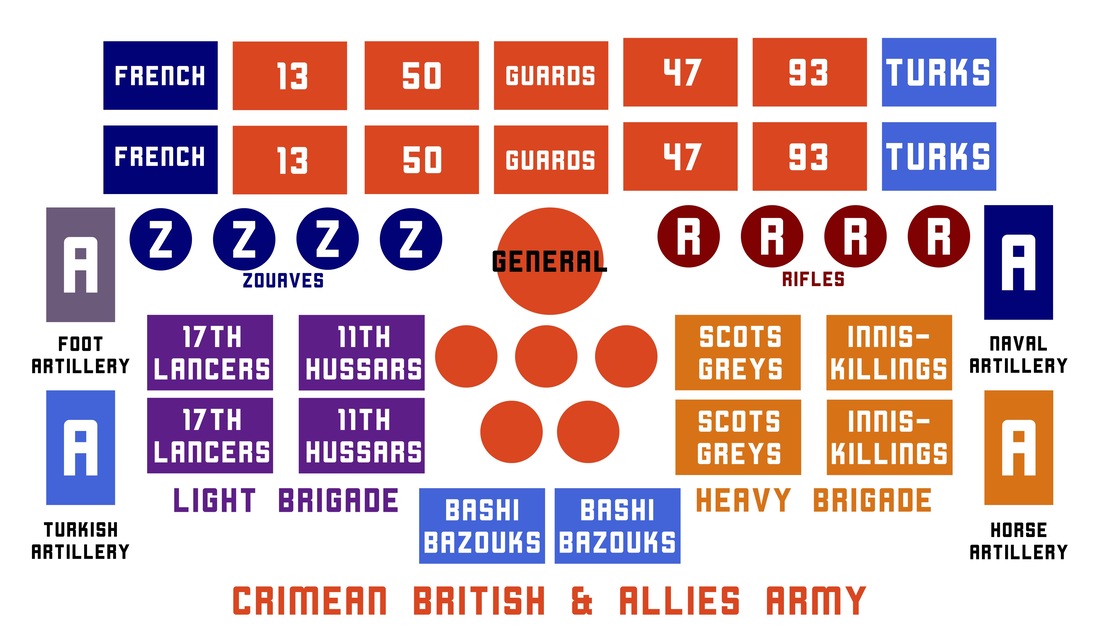
My completed British and allies army




|